
 产品:93
产品:93
 联系我们
联系我们

工业机器人的操作通过手持操作器(即 KUKA smartPAD)进行操作的,例如进行编程、校正、调试等。下图为手持操作器(以库卡机器人为例),它通过信号线和电源线与机器人控制器连接,完成信号输送,完成控制操作。
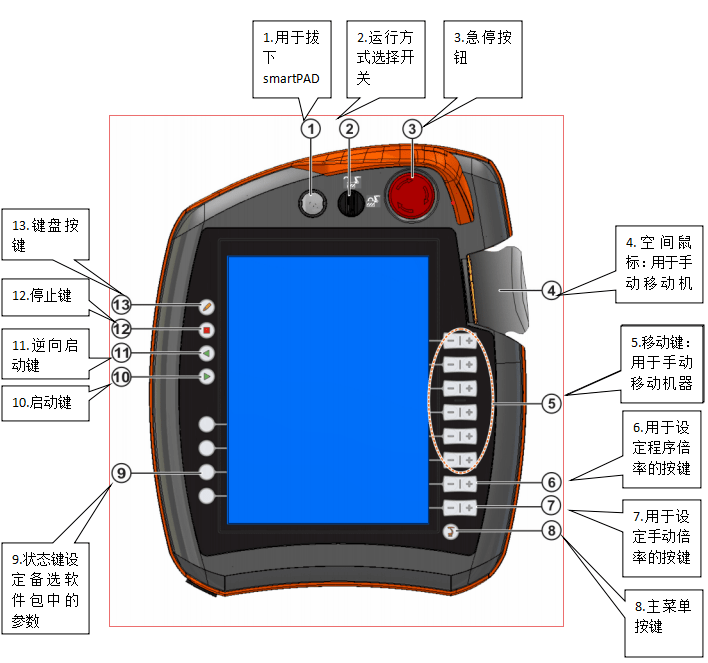
库卡机器人KCP4示教器 smartPAD 正面
1 、用于拔下 smartPAD 的按钮
(>>> 4.1.3 "取下和插入 smartPAD" 页面 44)
2 、运行方式选择开关:开关可按以下选型进行设计:
• 带钥匙
只有在插入钥匙的情况下才能更改运行方式。
• 不带钥匙
通过运行方式选择开关可以调用连接管理器。通过连接管理器可以切换运行方式。
(>>> 4.15 "更换运行方式" 页面 64)
3 、紧急停止装置:用于在危险情况下关停机器人。按下紧急停止装置时,它将会自行闭锁。
4 、空间鼠标:用于手动移动机器人
5 、移动键:用于手动移动机器人
6 、用于设定程序倍率的按键
7 、用于设定手动倍率的按键
8 、主菜单按键:用来在 smartHMI 上将菜单项显示出来。此外,可以通过它创建屏幕截图。
9 、状态键:状态键主要用于设定备选软件包中的参数。其确切的功能取决于安装的备选软件包。
10 、启动键:通过启动按键,可启动一个程序。
11 、逆向启动键:按下逆向启动键逆向启动一个程序。程序将逐步执行。
12 、停止键:用停止键可暂停运行中的程序。
13 、键盘按键:
显示键盘。通常不必特地将键盘显示出来,因为 smartHMI 可识别需要通过键盘输入的情况并自动显示键盘。
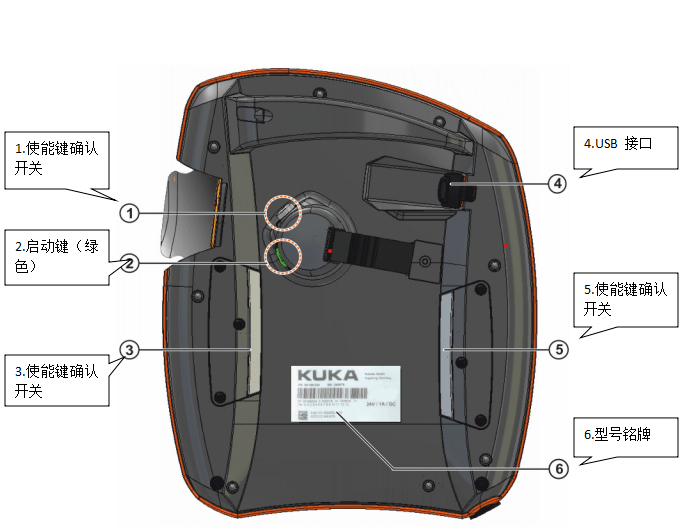
库卡机器人KCP4示教器smartPAD 背面
序号 说明
1 、确认开关
确认开关具有 3 个位置:
• 未按下
• 中位
• 完全按下(紧急位置)
只有当至少一个确认开关保持在中间位置时,方可在测试运行方式下运行机械手。
在采用自动运行模式和外部自动运行模式时,确认开关不起作用。
2 、启动键(绿色):通过启动按键,可启动一个程序。
3 、确认开关
4 、USB 接口:用于例如存档/恢复。
仅适于 FAT32 格式化的 U 盘。
5 、确认开关
6 、型号铭牌
1.KUKA机器人变量的应用-----常用系统变量介绍:
2.KUKA常用述语用详解
3.库卡机器人编程之BAS程序
4.库卡机器人零点校准
5.工业机器人新机拆箱的哪些事

库卡KUKA工业机器人KRC4示教器的使用方法如上面所描述