
 产品:93
产品:93
 联系我们
联系我们

库卡机器人硬件与电气元件维修
因使用环境的影响及长年的工作生产,机器人电机或减速机出现问题时有发生。还有控制器内部的电气元件也可能因与外部设备之间不当的使用而出现导致损坏的情况。购置新的配件当然价格不菲,如果能维修当然是可以省下可观的费用了。
工业机器人控制器:伺服驱动器,伺服驱动电源,多功能轴卡,主机,主板,显卡,IO控制板卡,伺服轴卡,伺服CPU控制卡,伺服电源,伺服电机,伺服控制器,伺服本体,机器人控制器。
程序流程控制
除了纯运动指令和通讯指令(切换和等待功能)之外,在机器人程序中还有大量用于控制程序流程的程序。其中包括:
循环 | 循环是控制结构。它不断重复执行指令块指令,直*出现终止条件。
- 无限循环
- 计数循环
- 当型和直到型循环
分支 | 使用分支后,便可以只在特定的条件下执行程序段。
- 条件分支
- 多分支结构
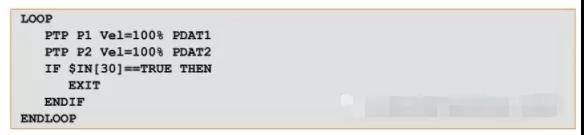
无限循环 :在无限循环中无止境地重复指令段。然而,却可通过一个提前出现的中断(含 EXIT 功能)退出循环语句。
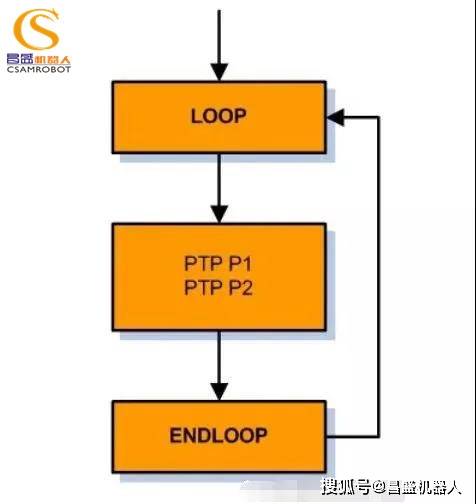
程序流程图:无限循环
LOOP 指令举例:
- 无 EXIT:***执行对 P1 和 P2 的运动指令

- 带 EXIT:一直执行对 P1 和 P2 的运动指令,直到输入端 30 切换到 TRUE。
计数循环 :用计数循环 (FOR 循环语句)可使指令重复定义的次数。循环的次数借助于一个计数变量控制。
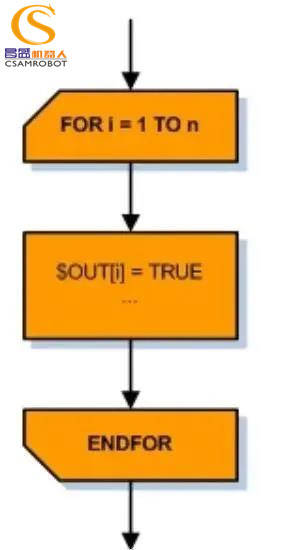
程序流程图:FOR 循环语句
一个 FOR 循环语句举例:将输出端 1 * 5 依次切换到 TRUE。用整数(Integer) 变量 “i” 来对一个循环语句内的循环进行计数。

当型循环: WHILE 循环是一种当型或者先判断型循环,这种循环会在执行循环的指令部分前先判断终止条件是否成立。
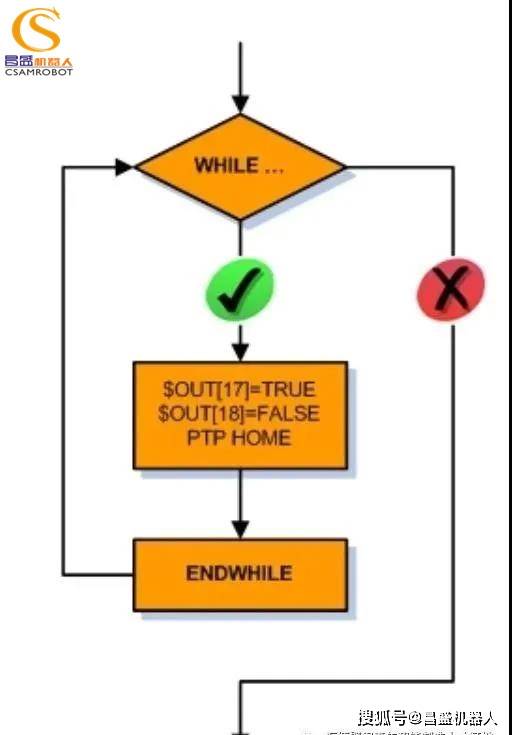
WHILE 程序流程图
WHILE 循环示例:输出端 17 被切换为 TRUE,而输出端 18 被切换为FALSE,并且机器人移入 Home 位置,但仅当循环开始时就已满足条件 (输入端 22 为 TRUE)时才成立。

直到型循环: REPEAT 循环是一种直到型或者检验循环,这种循环会在*一次执行完循环指令部分后才会检测终止条件。
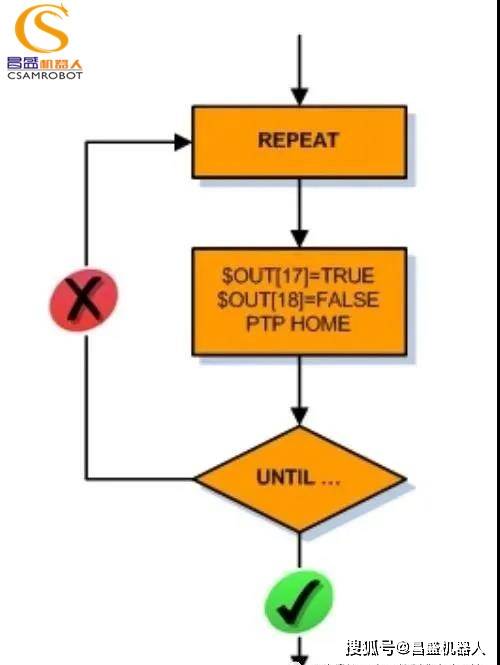
程序流程图 REPEAT
REPEAT 循环示例:输出端 17 被切换为 TRUE,而输出端 18 被切换为FALSE,并且机器人移入 Home 位置。这时才会检测条件。

条件性分支 :条件性分支 (IF 语句)由一个条件和两个指令部分组成。如果满足条件,则可处理*一个指令。如果未满足条件,则执行*二个指令。
但是,对 IF 语句也有替代方案:
- *二个指令部分可以省去:无 ELSE 的 IF 语句。由此,当不满足条件时紧跟在分支后便继续执行程序。
- 多个 IF 语句可相互嵌套 (多重分支):问询被依次处理,直到有一个条件得到满足。

程序流程图:IF 分支
IF 语句举例:如果满足条件 (输入端 30 必须为 TRUE),则机器人运动到点P3,否则到点 P4。

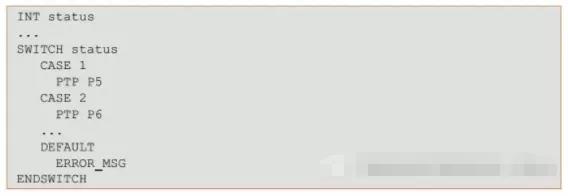
分配器: 一个 SWITCH 分支语句是一个分配器或多路分支。此处*先分析一个表达式。然后,该表达式的值与一个案例段 (CASE) 的值进行比较。值一致时执行相应案例的指令。
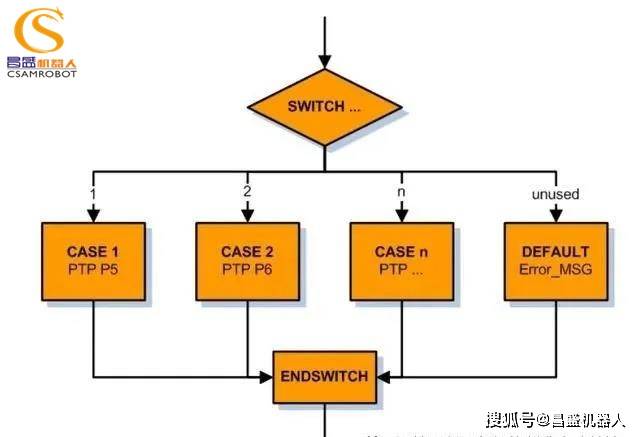
程序流程图:分配模块 SWITCH - CASE
对带有名称 “ 状态 ” 的整数变量 (Integer),*先要检查其值。如果变量的值为1,则执行案例 1 (CASE 1):机器人运动到点 P5。如果变量的值为 2,则执行案例 2 (CASE 2):机器人运动到点 P6。如果变量的值未在任何案例中列出(在该例中为 1 和 2 以外的值),则将执行默认分支:故障信息。
了解更多库卡机器人知识欢迎点击咨询:库卡机器人配件